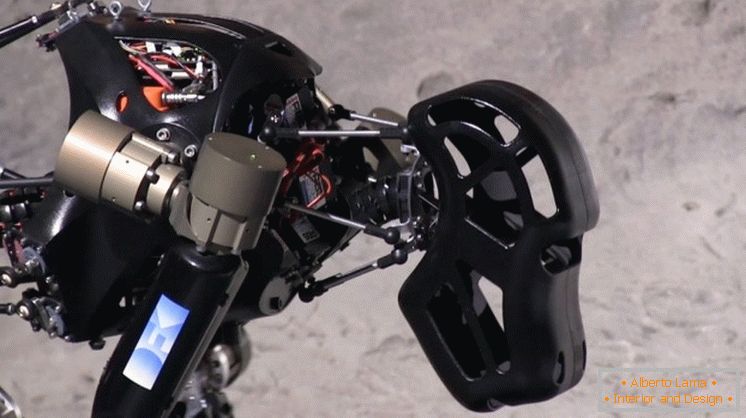
A német mesterséges intelligencia kutatóközpont (DFKI) és a Bremeni Egyetem a Simian Robot iStruct Demonstratoron dolgozik, "space robotnak" minősül. Most a mechanikus majmok haladnak a gyaloglás és az egyensúly megteremtésében a hold megkönnyebbüléséhez közeli körülmények között.

A veszélyes holdfelületek tanulmányozása különböző mozgásformák használatát igényli, és a DFKI kutatói tanulmányozzák képességeiket (beleértve a lábak, a kerekek és a hernyók kombinációját). A majomszerű robotok bizonyos előnyökkel rendelkeznek a kerekes, négypontos támogatáshoz képest, így stabilabb helyzetet teremthet az akadályok vagy a dombos terepek felmászása során. A robot egyensúlyozhat a hátsó lábán, hogy felszabadítsa a mellső végtagokat, hogy bármilyen tevékenységet végezzen.

Az új nemzetközi érdekekkel a holdi küldetésben lehetőség van arra, hogy az iStruct (vagy egyik leszármazottja) képes legyen meglátogatni a holdat. A Moon robotok általi gyarmatosítása olyan fejlõdéssel kezdődik, amely minden aktuális helyzetben fejlõdhet és ésszerûen reagálhat: e tekintetben a projekt célja "fejlett mesterséges intelligencia" építése és egy olyan robotrendszer, amely képes tanulni és navigálni.
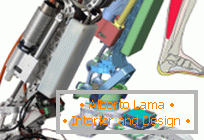
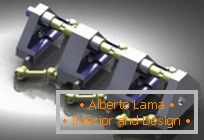
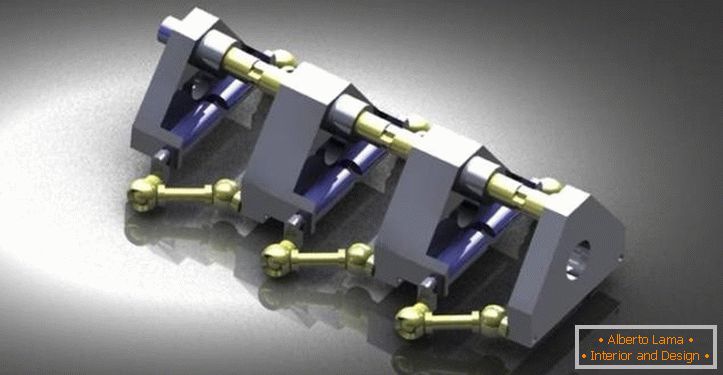
A robotnak van egy csuklós gerincje, amely összeköti a törzsét és a medencét, nagyobb rugalmasságot biztosít, valamint egy olyan terhelésérzékelőt, amely a talajjal érintkező láb és boka esetén reagál.
Egyéb funkciók:
- 43 független motor;
- Hat további FSR érzékelő az akadályok felderítésére használt nyitott részeken;
- 6 tengelyes nyomatékérzékelő;
- Digitális 3-tengelyes gyorsulásmérő, amely észleli a láb tájolását a térben;
- Két hőmérséklet-érzékelő kompenzálja az elektronika hőmérsékletváltozását;
- Digitális mágneses érzékelő a láb és a boka ízület mozgatható tengelyének szögvezérléséhez;
A legtöbb robot már tartalmaz számos ilyen érzékelőt, de a csuklós iStruct gerinc (amely 6 tengelyes nyomatékátalakítóként működhet) egyfajta ritkaság a mozdonyok számára, amelyek mind a négyen mozognak. A láb- és bokaízületek érzékelői lehetővé teszik számukra, hogy egyensúlyát egy ferde felületen tartsa.
2008-ban és 2009-ben Daniel Kuhn posztgraduális mérnök egy hasonló roboton dolgozott. Egy kis majom, amely képes volt egyszerű négylábú séta. A projekt után megkezdte az iStruct munkáját, amely számos jelentős frissítést tartalmaz. Ez sokkal nagyobb súly, 18 kg (66 kg) és 66 x 43 x 75 cm (26 x 17 x 29 hüvelyk) méretű, 26 fokos szabadságot is tartalmaz, és különféle villanymotorok hajtják végre. A projektnek idén augusztusban kell elkészülnie.
Láthatja, hogyan használja az intellektuális lábát és bokait, miközben sétál, és fenntartja az egyensúlyt az alábbi videóban. Ez egy kis lépés egy majom robot számára, de potenciálisan óriási ugrás az összes hasonló robotika számára.
gyalogló
kiegyensúlyozó
Fotógaléria Összesen | 14 kép